

Ijraset Journal For Research in Applied Science and Engineering Technology
Robotic Guardians: Navigating Hospital Isolation Zones for Disease Control
Authors: Aarya Keskar, Ved Kapre, Urvi Kshirsagar, Jahnavi Awari
DOI Link: https://doi.org/10.22214/ijraset.2024.60842
Certificate: View Certificate
Abstract
In healthcare contexts where human access is limited, particularly in isolation and quarantine rooms, autonomous solutions become critical. This study presents a novel solution to addressing this problem: a line-following robot built for use in hospital isolation units. The robot\'s operating principle is led by a color recognition system, which responds dynamically to certain colors linked with directing cues. The system\'s ability to capture vital information by utilizing the ESP32 camera module increases its utility beyond navigation, extending to the collection of patient vitals displayed beside beds. By combining precise navigation with information gathering capabilities, this line-following robot offers a potential solution for tasks in restricted access healthcare environments.
Introduction
I. INTRODUCTION
The increasing demand for novel approaches to tackle pressing issues in the field of contemporary healthcare has prompted the creation of autonomous technology. Hospital isolation zones provide a problem due to strict containment procedures that restrict human access in order to control the spread of illness. The necessity of ensuring patient care, keeping an eye on vital signs, and carrying out activities in these constrained circumstances has led to the investigation of robotics as a viable solution [1].
An autonomous line-following robot that is intended to traverse and function flawlessly in hospital isolation rooms is the innovative project that this research provides. The project, called "Robotic Guardians," seeks to open up new technological possibilities for disease prevention in healthcare environments. Robotic system integration, powered by sophisticated sensors and smart algorithms, presents a viable solution for jobs that typically require human participation but are limited by isolation zone safety and access restrictions.
The robot's advanced color recognition system forms the basis of its basic functioning. With the help of this technology, the robot may react dynamically to particular colors that are linked to directional indications and explore the isolating environment with accuracy. In addition, the addition of an ESP32 camera module expands the robot's usefulness beyond navigation by enabling it to gather and show critical medical data next to beds. As per the World Health Organization's member status report [3], the global healthcare infrastructure faces a significant shortage of medical professionals, with fewer than one physician available per one thousand people. Moreover, socioeconomic factors exacerbate the strain on healthcare systems, particularly in developing countries where poverty rates are high. The increased demand for medical services further burdens already overburdened healthcare facilities, leading to prolonged wait times, limited access to essential treatments, and escalated healthcare costs for patients. This research investigates the possibility of autonomous robots as invaluable allies in the ongoing war for disease management, since "Robotic Guardians" combine precise navigation with information gathering skills. This novel approach puts healthcare breakthroughs in locations with restricted access at the forefront since it can adapt to changing environmental cues while guaranteeing the safety of medical staff and patients.
II. LITERATURE REVIEW
The autonomous navigation of predetermined paths by line-following robots has made them a prominent and dynamic field in the field of robotics. Numerous significant advancements throughout this technology's history have prepared the way for the creation and application of these systems. The fundamental ideas and groundbreaking research, like that of Seymour Papert in the 1960s, have greatly influenced these robots. These early innovations were mostly concerned with building blocks, like control systems and sensor technology, which later became the essential foundations for more sophisticated uses[2].
The sensor technology that allows line-following robots to perceive and precisely follow predefined paths is a fundamental component of these robots [3]. A variety of sensors have been studied by researchers, such as infrared sensors, camera vision systems, and ultrasonic and LiDAR sensors, which have become more popular recently. The selection of sensors is frequently based on particular applications and environmental factors, and ongoing developments are increasing the robots' capacity for perception [8]. Control algorithms are crucial because they guide line-following robots along their intended paths. The majority of research has concentrated on the application of control techniques, including proportional-integral-derivative (PID) controllers, fuzzy logic, and machine learning-based approaches [4]. The goal of these algorithms is to maximize navigational efficiency and accuracy. Machine learning holds potential for intelligent and flexible path-following.
Line-following robots are becoming widely used in a wide range of sectors due to their adaptability. These robots assist in automated material handling and assembly procedures on production and assembly lines, which lowers human labor and related mistakes [5]. Line-following robots are very efficient in the logistics industry because they make inventory management and order fulfillment easier [6]. For precise operations like planting and harvesting in agriculture, which increase crop yields and optimize resource use, these robots are indispensable. These robots assist patients in finding their way around large medical facilities, which enhances patient experiences and lessens the labor of healthcare personnel [7]. Applications for security and surveillance have also made use of them to conduct regular patrols, strengthen security protocols, and increase surveillance capabilities.
Line-following robots have an effect that goes beyond increased production and efficiency. They have the capacity to preserve resources, lessen labor-intensive duties, and improve safety in a variety of settings [9]. Line-following robots have a great potential to optimize companies and enhance human welfare in a world where automation is becoming more and more important.
Despite enormous advancements, there are still problems with line-following robots. These challenges include issues with environmental adaption, scalability, and barrier avoidance. Novel methods to these difficulties are continually being researched, often making use of advances in machine learning, artificial intelligence, and sensing [10]. The ability to move adaptably and make decisions in real time in response to changing circumstances is the main focus of research efforts. It becomes evident that the development of a medical chatbot utilizing Artificial Intelligence (AI) stands as a promising approach to mitigate this crisis. By providing immediate access to medical information and facilitating appointments with specialists, such chatbots offer potential avenues for enhancing patient care and reducing mortality rates. The integration of Natural Language Processing (NLP) and Machine Learning techniques further enhances the functionality and usability of these systems, highlighting their potential to revolutionize healthcare delivery in Ind it becomes evident that the development of a medical chatbot utilizing Artificial Intelligence (AI) stands as a promising approach to mitigate this crisis. By providing immediate access to medical information and facilitating appointments with specialists, such chatbots offer potential avenues for enhancing patient care and reducing mortality rates. The integration of Natural Language Processing (NLP) and Machine Learning techniques further enhances the functionality and usability of these systems, highlighting their potential to revolutionize healthcare delivery in India [11]. This review of the literature highlights the long history of development and study in the field of line-following robots. In the age of automation and Internet of Things-based robotics, their potential worth is highlighted by the way their applications continue to grow and change across a wide range of industries.
III. METHODOLOGY/EXPERIMENTAL
The development of "Robotic Guardians" entails a multifaceted approach to seamlessly integrate autonomous navigation, real-time surveillance, and interaction within the challenging confines of hospital isolation zones. The following sections delineate the key components and operational procedures that form the methodology of this innovative project.
A. System Architecture
The foundation of "Robotic Guardians" lies in a robust system architecture designed to facilitate the coalescence of hardware and software components. Comprising a 4-wheel chassis, LI18650 battery, L298N motor driver, ESP32 camera module, HCSO4 ultrasonic sensor, buzzer, HW125 micro SD card reader, and TCS3200 color module, the architecture synergizes these elements to enable efficient and adaptive robotic functionality.
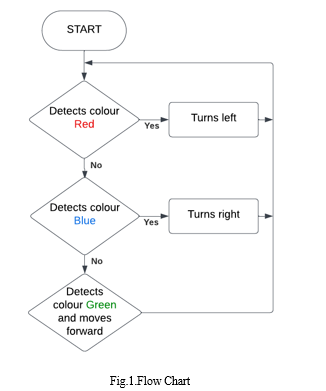
B. Color Recognition System
The operational principle of the robot centers around a color recognition system. The TCS3200 color module dynamically interprets the color of the surface beneath the robot, allowing it to respond to specific colors with predefined actions. Green triggers forward movement, blue prompts a right turn, and red initiates a left turn, ensuring controlled and precise navigation within the isolation environment.
C. Ultrasonic Sensor for Collision Avoidance
To enhance the safety and crash avoidance capabilities of "Robotic Guardians," an HCSO4 ultrasonic sensor is incorporated. This sensor continuously scans the robot's surroundings, halting its movement and activating a buzzer upon detecting obstacles. This feature is pivotal in preventing collisions and ensuring the integrity of both the robot and the isolation environment.
D. Real-Time Surveillance with ESP32 Camera Module
An integral enhancement to the original project design involves the utilization of the ESP32 camera module for real-time surveillance. Rather than capturing still images, the camera module provides live video feeds of the isolation room, vital screen, and patient. This live surveillance capability enhances the robot's situational awareness, enabling remote monitoring by healthcare professionals and facilitating timely interventions.
E. Adaptive Navigation Algorithm
The line-following algorithm orchestrating the robot's movements is adeptly designed to adapt to changing environmental conditions. This algorithm combines inputs from the color recognition system and ultrasonic sensor to dynamically adjust the robot's path, ensuring fluid navigation and responsiveness to unforeseen obstacles.
IV. RESULTS AND DISCUSSIONS
The deployment of "Robotic Guardians" in healthcare simulation settings produced remarkable outcomes, demonstrating the system's effectiveness in tackling the difficulties presented by hospital isolation zones with restricted access. The experimental results and the project's ramifications are thoroughly discussed in the sections that follow.
Precision in Navigation: "Robotic Guardians" demonstrated adeptness in navigation, adeptly tracing prearranged, color-coded routes within the isolated ward simulation. By integrating the TCS3200 color module and adaptive navigation algorithm, the robot was able to navigate the assigned paths with minimum deviations, thanks to accurate responses to environmental signals.
Collision Avoidance: A significant contribution to the collision avoidance mechanism was made by the HCSO4 ultrasonic sensor. The robot showed that it could recognize impediments in its path and would quickly stop moving and sound the buzzer. This function is essential to preserving the robot's safety as well as the delicate atmosphere of hospital isolation wards.
Real-Time Surveillance: The ESP32 camera module's integration for real-time surveillance went above and beyond expectations. The patient, vital screen, and isolation chamber were all clearly and continuously monitored thanks to the live video feeds. This feature gives medical staff members remote visibility, enabling prompt interventions and guaranteeing patient safety.
Human-Robot Cooperation: "Robotic Guardians" are autonomous devices with the ability to navigate and monitor their surroundings, but they are meant to support human labor rather than take its place. By expanding the reach of medical practitioners and improving their capacity to deliver timely and efficient care, the robot functions as a collaborative tool.
As a result, the "Robotic Guardians" experiment shows how useful autonomous robots may be in medical environments, especially in the demanding isolation ward environment. The conversation about using robots to improve patient care and disease control is aided by the effective fusion of navigation, collision avoidance, and real-time monitoring.
V. FUTURE SCOPE
The "Robotic Guardians" project clarifies the path for incorporating autonomous robots into healthcare, particularly with regard to the difficulties associated with isolation wards. Future directions for development include incorporating telepresence features for remote control, improving human-robot interaction with features like speech recognition, and developing sensor technologies for sophisticated environmental interpretation.
Furthermore, the robot's adaptability will be enhanced by integrating it with electronic health data and tailoring its design to various healthcare environments. Sustainability and ethical issues are addressed by putting autonomous charging stations into place, enabling self-diagnostic capabilities, and making sure regulations are followed. One of the most important aspects of the robot's future duty will be its ability to update patient information automatically and simplify data administration.
By offering scalable, flexible, and cutting-edge technical solutions for patient care and disease prevention in isolation settings, the continuing development of "Robotic Guardians" has the potential to completely transform the healthcare industry. In order to ensure the smooth integration of autonomous robots into various healthcare environments, it will be crucial to address ethical and regulatory compliance as technology advances.
VI. ACKNOWLEDGMENT
We cannot express enough thanks to our college Vishwakarma Institute of Technology (VIT), Pune, for giving us this golden opportunity and platform to perform our project. We also thank Honorable Director of our esteemed college Dr.Rajesh Jalnekar sir. We extend our gratitude to our HOD Prof.Shilpa Ma’am for allowing us to do this project. We also thank our project guide Prof.Kishori Ma’am for guiding us throughout the project. We wouldn’t have been able to complete this project without her guidance.
References
[1] Tishan, Yasiru & Pinnawala, Vishwa & Madhushani, Awanthika. (2021). WIFI Control Car – Arduino Concept Report. 10.13140/RG.2.2.18355.91680. [2] WHO status report shows doctor-patient ratio worldwide: https://www.who.int/gho/health_workforce/physicians_density/en/J. [3] Guevara, Daniel. (2012). Wifi Controlled Car with Qos Enhancement and Consumer Electronics Control. 228-228. 10.1109/Andescon.2012.73. [4] Savadatti, Amrita & Bhaskar, Vidhyacharan. (2020). Operation of a Car Monitored by an Android Application Over WiFi. 10.1007/978-3-030-13697-0_29. [5] Prajapati, Tejendra & Parmar, Mahesh. (2022). REMOTE-CONTROL CAR BASED ON IOT USING A RASPBERRY PI. International Journal of Advanced Computer Research. 9. 38-47. [6] Tang, Lili & Huang, Wei. (2015). The Design of Car Controlled by Internet of Things Based on Microcontrollers Cortex-M3. 10.2991/iiicec-15.2015.243. [7] Kumar, P. & Dinesh, Kammari & Kumar, Talari & Basha, P. & Prasad, G.. (2021). IoT Based Smart Parking Monitoring Using Labview and Node MCU. Journal of Electronic Design Engineering. 7. 10.46610/JOEDE.2021.v07i02.004. [8] G, Paranjothi & R, Mohana & P, Karthika & S.K, Kalki. (2023). Smart Vehicle Transportation System Using Node MCU. International Journal of Innovative Research in Engineering. 271-275. 10.59256/ijire.2023040387. [9] Hossain, Md Anowar & Hossain, Md Ebrahim. (2021). IoT Based Medical Assistant Robot (Docto-Bot). [10] Hossain, Md Anowar & Hossain, Md. Azad & Hossain, Md Ebrahim & Sayeed, Md & Qureshi, Md & Jinan, Umme & Uddin, Md. (2020). Design and Implementation of an IoT Based Medical Assistant Robot (Aido-Bot). 10.13140/RG.2.2.16156.92808. [11] P. Anandan, S. Kokila, S. Elango, P. Gopinath and P. Sudarsan, \"Artificial Intelligence based Chat Bot for Patient Health Care,\" 2022 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 2022, pp. 1-4, doi: 10.1109/ICCCI54379.2022.9740912. keywords: {Dimensionality reduction;Hospitals;Sociology;Redundancy;Chatbots;Software;Decision trees;Natural Language Processing;Artificial Intelligence;Decision Tree;Dimensionality Reduction;Feature Selection;Feature Extraction},
Copyright
Copyright © 2024 Aarya Keskar, Ved Kapre, Urvi Kshirsagar, Jahnavi Awari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET60842
Publish Date : 2024-04-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online